 Una massa Una massa  [101] [283] m, ferma su una giostra orizzontale in rotazione, descrive una circonferenza di raggio r e centro O ad una velocità v. La massa è sottoposta ad una forza centripeta mv2/r diretta verso O e a una forza tangente alla traiettoria mat, dove at è l’accelerazione [101] [283] m, ferma su una giostra orizzontale in rotazione, descrive una circonferenza di raggio r e centro O ad una velocità v. La massa è sottoposta ad una forza centripeta mv2/r diretta verso O e a una forza tangente alla traiettoria mat, dove at è l’accelerazione  di m nella medesima direzione tangente [72] [113] [161]. Sulla giostra non è valido il secondo principio della dinamica forza = massa x accelerazione, perché il sistema di riferimento è accelerato . Ivi m appare ferma e quindi con accelerazione nulla, da cui consegue che la forza dovrebbe essere zero, in contrapposizione all’esistenza delle azioni meccaniche registrate dall’osservatore terrestre esterno alla giostra. Per giustificare la quiete di m sulla piattaforma, dobbiamo introdurre due forze apparenti, dovute all’accelerazione del sistema di riferimento, che si oppongono alle precedenti sollecitazioni reali in maniera che la risultante delle forze sia nulla. La forza apparente uguale e contraria a quella centripeta viene denominata forza centrifuga , vale mv2/r ed è quindi proporzionale direttamente a m e al quadrato di v ed inversamente al raggio di curvatura. La forza centrifuga su un veicolo, in moto circolare su un piano orizzontale, è applicata nel baricentro B del sistema ed agisce radialmente verso l’esterno della traiettoria. Con r minore, aumentano la forza centrifuga e il rischio di uscire fuori strada. L’altra forza apparente mat, tangente alla traiettoria, esplica la sua azione ancora in B in verso discorde all’accelerazione at di B. La forza centrifuga viene annullata dalle azioni centripete esercitate dalla strada sui pneumatici mediante l’attrito. La forza reale tangenziale è la risultante delle forze di propulsione che le ruote motrici sviluppano sul manto stradale e di tutte le resistenze passive discordi. Le forze fittizie sono sperimentate dall’osservatore interno all’autovettura [132]; dalla terra il moto si interpreta soltanto con le forze reali. Il peso del veicolo viene equilibrato dalle reazioni verticali del piano stradale; ma la forza centrifuga tende a caricare le ruote esterne e ad alleggerire quelle interne alla curva. Le ruote esterne compiono un giro più lungo e dunque devono ruotare più velocemente di quelle interne. Con la propulsione posteriore, le ruote anteriori girano autonomamente. Le ruote posteriori si possono muovere a differenti velocità perché utilizzano il differenziale . Nei kart manca il differenziale e perciò le ruote dell’assale motore devono slittare leggermente nelle curve. di m nella medesima direzione tangente [72] [113] [161]. Sulla giostra non è valido il secondo principio della dinamica forza = massa x accelerazione, perché il sistema di riferimento è accelerato . Ivi m appare ferma e quindi con accelerazione nulla, da cui consegue che la forza dovrebbe essere zero, in contrapposizione all’esistenza delle azioni meccaniche registrate dall’osservatore terrestre esterno alla giostra. Per giustificare la quiete di m sulla piattaforma, dobbiamo introdurre due forze apparenti, dovute all’accelerazione del sistema di riferimento, che si oppongono alle precedenti sollecitazioni reali in maniera che la risultante delle forze sia nulla. La forza apparente uguale e contraria a quella centripeta viene denominata forza centrifuga , vale mv2/r ed è quindi proporzionale direttamente a m e al quadrato di v ed inversamente al raggio di curvatura. La forza centrifuga su un veicolo, in moto circolare su un piano orizzontale, è applicata nel baricentro B del sistema ed agisce radialmente verso l’esterno della traiettoria. Con r minore, aumentano la forza centrifuga e il rischio di uscire fuori strada. L’altra forza apparente mat, tangente alla traiettoria, esplica la sua azione ancora in B in verso discorde all’accelerazione at di B. La forza centrifuga viene annullata dalle azioni centripete esercitate dalla strada sui pneumatici mediante l’attrito. La forza reale tangenziale è la risultante delle forze di propulsione che le ruote motrici sviluppano sul manto stradale e di tutte le resistenze passive discordi. Le forze fittizie sono sperimentate dall’osservatore interno all’autovettura [132]; dalla terra il moto si interpreta soltanto con le forze reali. Il peso del veicolo viene equilibrato dalle reazioni verticali del piano stradale; ma la forza centrifuga tende a caricare le ruote esterne e ad alleggerire quelle interne alla curva. Le ruote esterne compiono un giro più lungo e dunque devono ruotare più velocemente di quelle interne. Con la propulsione posteriore, le ruote anteriori girano autonomamente. Le ruote posteriori si possono muovere a differenti velocità perché utilizzano il differenziale . Nei kart manca il differenziale e perciò le ruote dell’assale motore devono slittare leggermente nelle curve.
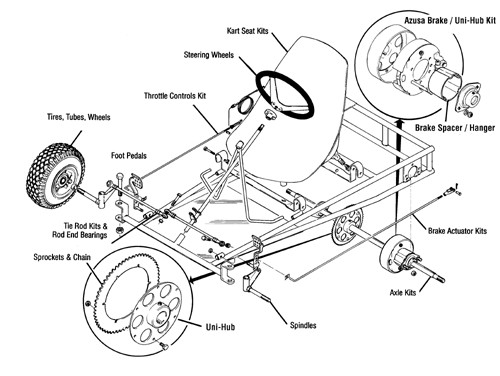 Un go-kart nei minimi dettagli ( dal sito www.mfgsupply.com) Un go-kart nei minimi dettagli ( dal sito www.mfgsupply.com)
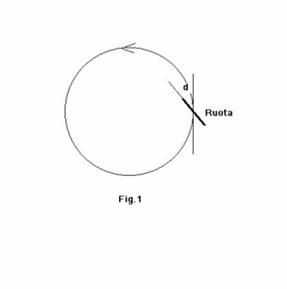
Ma le ruote esterne si caricano maggiormente per la forza centrifuga facilitando lo slittamento della ruota interna. Anche lo spostamento naturale del pilota verso l’esterno tende a far staccare la ruota motrice interna, evitando lo sfregamento col suolo. Durante la frenata il sistema tende a conservare la sua velocità per inerzia e ciò implica un trasferimento di carico dalle ruote posteriori a quelle anteriori. L’inverso avviene durante le accelerazioni. Il centro di una ruota, sottoposto ad un peso, descrive una traiettoria tangente al piano di simmetria del cerchione. La stessa ruota, sollecitata anche da una forza laterale, devia dalla tangente al tragitto dell’angolo di deriva d (fig.1).
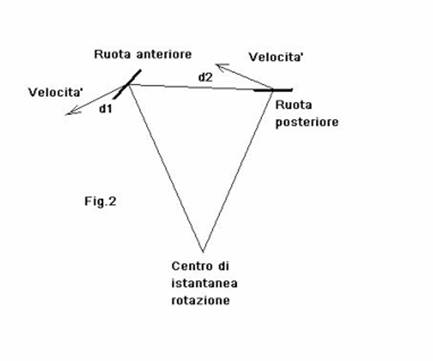
 L’autista deve fornire alle ruote l’angolo di deriva adeguato per consentire al veicolo di percorrere la curva. La forza laterale Fy cresce col carico verticale e con l’angolo di deriva fino a valori limiti. L’angolo di deriva dipende anche dalla pressione delle gomme (risulta difficoltoso sterzare un veicolo con le ruote sgonfie). Poiché la deriva aumenta con Fy, l’angolo di sterzata deve crescere con la velocità. Se le ruote sono simmetriche rispetto al baricentro, risultano uguali i carichi verticali e laterali dei due assali e pertanto sono identici gli angoli di deriva anteriore e posteriore (fig.2). L’autista deve fornire alle ruote l’angolo di deriva adeguato per consentire al veicolo di percorrere la curva. La forza laterale Fy cresce col carico verticale e con l’angolo di deriva fino a valori limiti. L’angolo di deriva dipende anche dalla pressione delle gomme (risulta difficoltoso sterzare un veicolo con le ruote sgonfie). Poiché la deriva aumenta con Fy, l’angolo di sterzata deve crescere con la velocità. Se le ruote sono simmetriche rispetto al baricentro, risultano uguali i carichi verticali e laterali dei due assali e pertanto sono identici gli angoli di deriva anteriore e posteriore (fig.2).
 Allora gli assi conservano la loro rotazione con una lieve deriva verso l’esterno eliminabile incrementando leggermente l’angolo di sterzo. Se è maggiore la deriva anteriore, l’auto tende ad accrescere il raggio di curvatura e si trova in posizione di sottosterzo. La traiettoria del veicolo si può adattare alla strada aumentando la sterzata. Inversamente occorre regolarsi in caso di sovrasterzo in cui è superiore la deriva posteriore. La diminuzione di velocità, a parità di curvatura, induce la decrescita della resistenza dell’aria, proporzionale al quadrato di v, ma anche della forza centripeta e quindi dell’angolo di deriva. La resistenza dell’aria soprattutto sui veicoli veloci può fornire uno specifico apporto al carico verticale per migliorare la stabilità del veicolo. Quando si passa da un percorso rettilineo ad un arco di circonferenza con una velocità sostenuta, la curvatura subisce una variazione repentina e diventa arduo seguire la corsia perché non si può sterzare istantaneamente. Per agevolare la manovra le strade a scorrimento veloce vengono costruite con una curvatura graduale dal rettilineo fino all’arco. Sulle piste, una curva più ampia viene percorsa da vetture pesanti e con potenze modeste; si tende a introdurre e conservare in curva un’opportuna velocità compatibile con la stabilità e l’attrito [295], perché la ripresa è lenta. Le vetture leggere e potenti sono poco controllabili nelle curve, ma possono fruire di congrue accelerazioni. L’auto viene frenata in modo da inserirsi con velocità esigua in curva, viene sterzata e accelerata nel rettilineo. La ruota motrice può esplicare sul bordo una data forza tangenziale Q. Intanto, il fondo stradale applica sul contatto della ruota una forza A, discorde a Q, con valore massimo Amax = f Fn, dove Fn è il carico ortogonale al piano d’appoggio ed f è il coefficiente di aderenza dipendente dalla natura e dalla rugosità delle parti a contatto, nonché dall’eventuale fluido interposto tra le superfici combacianti (fig.3). Allora gli assi conservano la loro rotazione con una lieve deriva verso l’esterno eliminabile incrementando leggermente l’angolo di sterzo. Se è maggiore la deriva anteriore, l’auto tende ad accrescere il raggio di curvatura e si trova in posizione di sottosterzo. La traiettoria del veicolo si può adattare alla strada aumentando la sterzata. Inversamente occorre regolarsi in caso di sovrasterzo in cui è superiore la deriva posteriore. La diminuzione di velocità, a parità di curvatura, induce la decrescita della resistenza dell’aria, proporzionale al quadrato di v, ma anche della forza centripeta e quindi dell’angolo di deriva. La resistenza dell’aria soprattutto sui veicoli veloci può fornire uno specifico apporto al carico verticale per migliorare la stabilità del veicolo. Quando si passa da un percorso rettilineo ad un arco di circonferenza con una velocità sostenuta, la curvatura subisce una variazione repentina e diventa arduo seguire la corsia perché non si può sterzare istantaneamente. Per agevolare la manovra le strade a scorrimento veloce vengono costruite con una curvatura graduale dal rettilineo fino all’arco. Sulle piste, una curva più ampia viene percorsa da vetture pesanti e con potenze modeste; si tende a introdurre e conservare in curva un’opportuna velocità compatibile con la stabilità e l’attrito [295], perché la ripresa è lenta. Le vetture leggere e potenti sono poco controllabili nelle curve, ma possono fruire di congrue accelerazioni. L’auto viene frenata in modo da inserirsi con velocità esigua in curva, viene sterzata e accelerata nel rettilineo. La ruota motrice può esplicare sul bordo una data forza tangenziale Q. Intanto, il fondo stradale applica sul contatto della ruota una forza A, discorde a Q, con valore massimo Amax = f Fn, dove Fn è il carico ortogonale al piano d’appoggio ed f è il coefficiente di aderenza dipendente dalla natura e dalla rugosità delle parti a contatto, nonché dall’eventuale fluido interposto tra le superfici combacianti (fig.3).
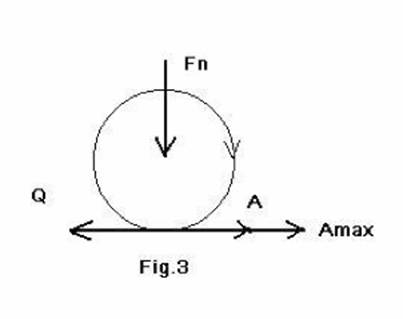 Per pneumatici su asfalto asciutto f può variare tra 0,6 e 0,8. Per Q>Amax, la ruota slitta. Qualora Q sia minore o uguale ad Amax, la ruota non slitta e le viene comunicata dalla strada la forza aderente A = Q. Se le A delle motrici vincono gli attriti antagonisti, il veicolo trasla senza slittare. Prudenza col kart e buon divertimento ! Per pneumatici su asfalto asciutto f può variare tra 0,6 e 0,8. Per Q>Amax, la ruota slitta. Qualora Q sia minore o uguale ad Amax, la ruota non slitta e le viene comunicata dalla strada la forza aderente A = Q. Se le A delle motrici vincono gli attriti antagonisti, il veicolo trasla senza slittare. Prudenza col kart e buon divertimento !
Pasquale Catone – Docente di Fisica
|